
Error sa format ng email
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


Ang tiyak na strcture ng servo
2024-04-29 16:44:08
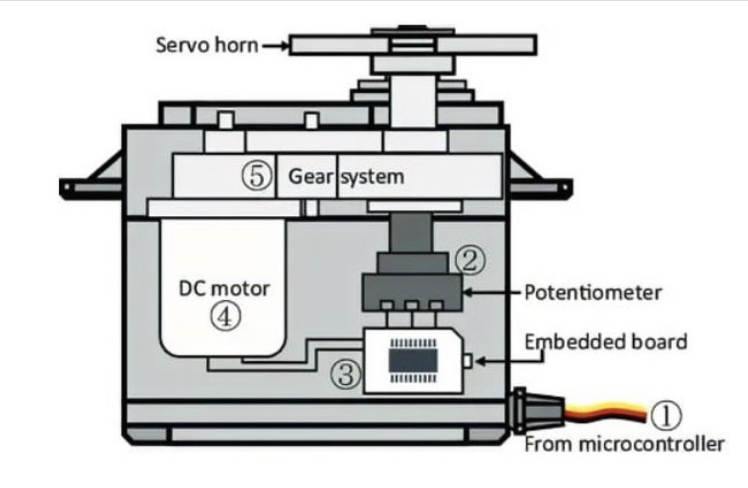
Ang tiyak na istraktura ng servo ay ang mga sumusunod:
①: Linya ng Signal: Tumanggap ng control signal mula sa microcontroller;
②: Potentiometer: masusukat nito ang posisyon ng output shaft, na kabilang sa
feedbackpart ng buong mekanismo ng servo;
③: panloob na magsusupil: pagproseso ng signal mula sa panlabas na kontrol, pagmamaneho ng motor at
Ang pagproseso ng signal ng posisyon ng feedback, ay ang pangunahing ng buong mekanismo ng servo;
④: motor: Bilang isang actuator, kung magkano ang bilis, metalikang kuwintas, posisyon ay output;
⑤: mekanismo ng paghahatid/sistema ng servo: ang mekanismong ito ay humahawak sa output stroke ng
motor sa panghuling anggulo ng output ayon sa isang tiyak na ratio ng paghahatid;
Ang output ng servo ay kinokontrol sa pamamagitan ng pagpapadala ng isang signal ng PWM sa linya ng signal ng servo.
①: Linya ng Signal: Tumanggap ng control signal mula sa microcontroller;
②: Potentiometer: masusukat nito ang posisyon ng output shaft, na kabilang sa
feedbackpart ng buong mekanismo ng servo;
③: panloob na magsusupil: pagproseso ng signal mula sa panlabas na kontrol, pagmamaneho ng motor at
Ang pagproseso ng signal ng posisyon ng feedback, ay ang pangunahing ng buong mekanismo ng servo;
④: motor: Bilang isang actuator, kung magkano ang bilis, metalikang kuwintas, posisyon ay output;
⑤: mekanismo ng paghahatid/sistema ng servo: ang mekanismong ito ay humahawak sa output stroke ng
motor sa panghuling anggulo ng output ayon sa isang tiyak na ratio ng paghahatid;
Ang output ng servo ay kinokontrol sa pamamagitan ng pagpapadala ng isang signal ng PWM sa linya ng signal ng servo.
Makipag-ugnayan sa amin
MGA TAG NG PRODUKTO
Makipag-ugnayan sa amin
Mangyaring ibigay ang iyong pagtatanong sa form sa ibaba. Sasagot kami sa iyo sa loob ng 24 na oras.